カメラモジュール用アクティブアライメント装置
Active Alignment Equipment
POINT
- 世界トップレベルの処理能力
- 現状: UPH1000
- 次世代機: ターゲットUPH1500 (開発中)
- スマートフォン用、車載用/カメラモジュールに適用可能
- 大型のセンサーサイズにも適用可能
※日本ファインテック(株)と共同開発

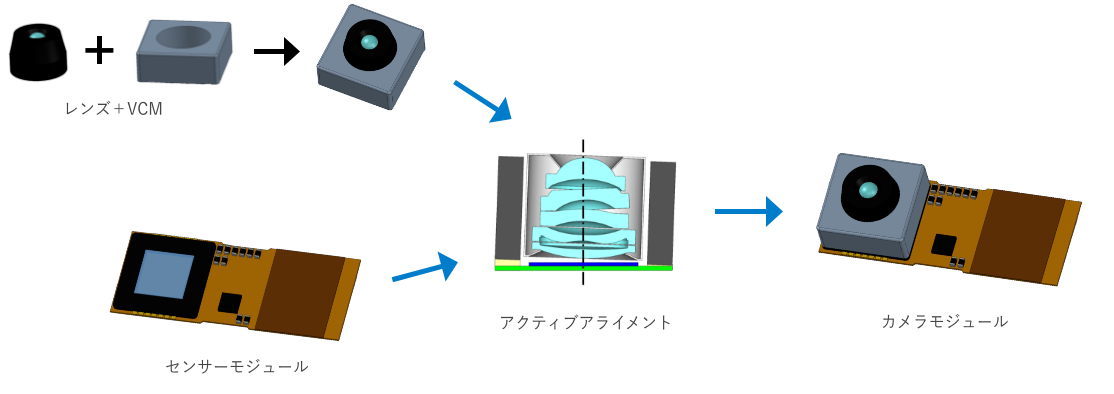
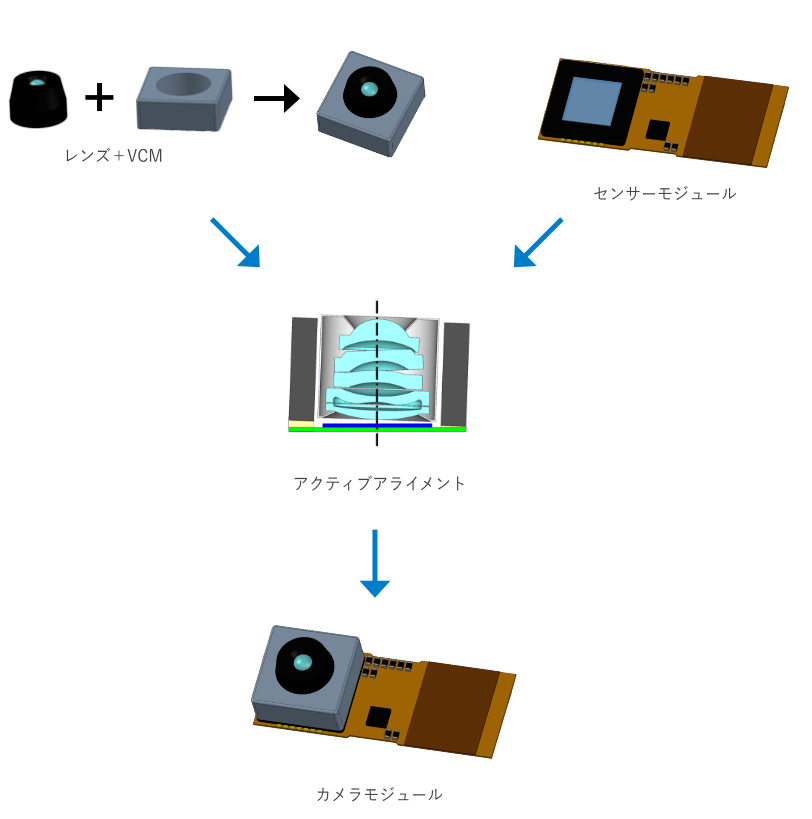
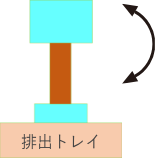
アクティブアライメント(AA)装置とは?
カメラモジュールの組立時に6軸のアライメントユニットでセンサーとレンズの光軸調整を行いUV照射により固定する装置です。
AA前
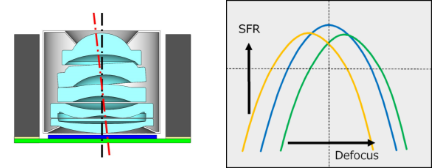
センサー組立バラつきやレンズ収差により解像度の低下(方ボケ等)。
AA後
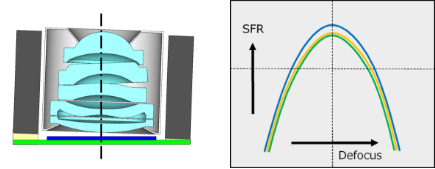
センサーとレンズの光軸調整をこなうことで、解像度のバラツキが低減、歩留り向上、画像品質向上。
アプリケーション
- スマートフォン用カメラモジュール(適用可能カメラモジュール: FF, AF, AF+OIS, センサー:~1インチ、4/3インチ)
- 車載用カメラ など
AA装置設計コンセプト
前工程(タレット方式)から4つのアクティブアライメントステージへの材料供給は、旋回アームを使用して処理能力を向上しています。
前工程(タレット方式)
- センサーモジュール供給
- センサー黒キズ検査(オプション)
- モジュールQRコード読み取り
- クリーニング(吸引ブロー)
- ディスペンス位置認識
- 接着剤塗布_2ステージ
- ディスペンス検査(パターン、線幅)
- レンズCVM供給(QRコード読取)
- レンズVCM組立検査 or レンズLCB検査(オプション)
供給用旋回アームで
材料をローディング

排出用アームで
完成品をアンローディング
4アクティブアライメントステージ
- センサーモジュール、レンズVCMを6軸調整の待機位置に供給
- アクティブアライメント位置に移動
- アクティブアライメント、UV硬化
- 待機位置に戻る
- カメラモジュールを排出
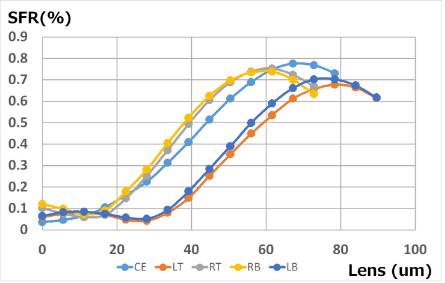
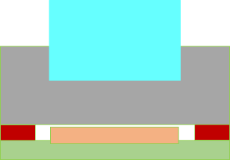
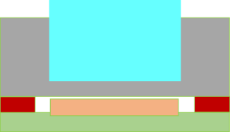
AA調整性能
AA調整にてセンサーとレンズの傾きを求め、画像の中心と周辺のピーク位置のズレを補正します。それにより、中心と周辺のピークが揃います。
アクティブアライメント前
アクティブアライメント後
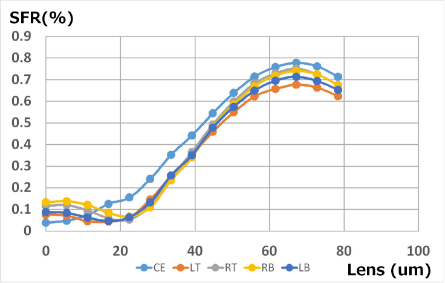
中心と周辺のピークが
揃っている
揃っている
±10μm以下を達成
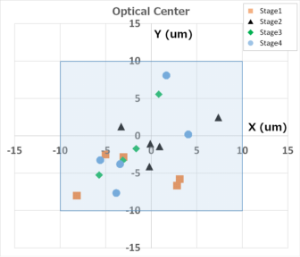
光学センサー測定結果
AA調整にてセンサー中心とレンズ中心を求め、光軸を合わせます。それにより、光軸特性が±10um以下を達成しています。
歩留まりロス低減と稼働率向上
追加オプション機能(黒キズ検査、レンズVCM組立検査、レンズLCB検査)を入れることで、歩留まりロス低減と稼働率向上を図ります。
AA工程、撮像検査での主な不良項目と原因
| 不良原因 | AA工程 | カメラ撮像検査 | ||
|---|---|---|---|---|
| レンズ性能 | レンズ検査スペックの問題 | OK | SFR不良 | |
| レンズ+VCM組立 | 組立不良(レンズ高さ、組立チルト) | AA出来ない※1 | ー | |
| センサーモジュール | アセンブリ不良 | ボンディング不良等 | AA出来ない※2 | I2C通信不良、画像出ず※2 |
| 異物不良 | OK | 黒キズ不良※2 | ||
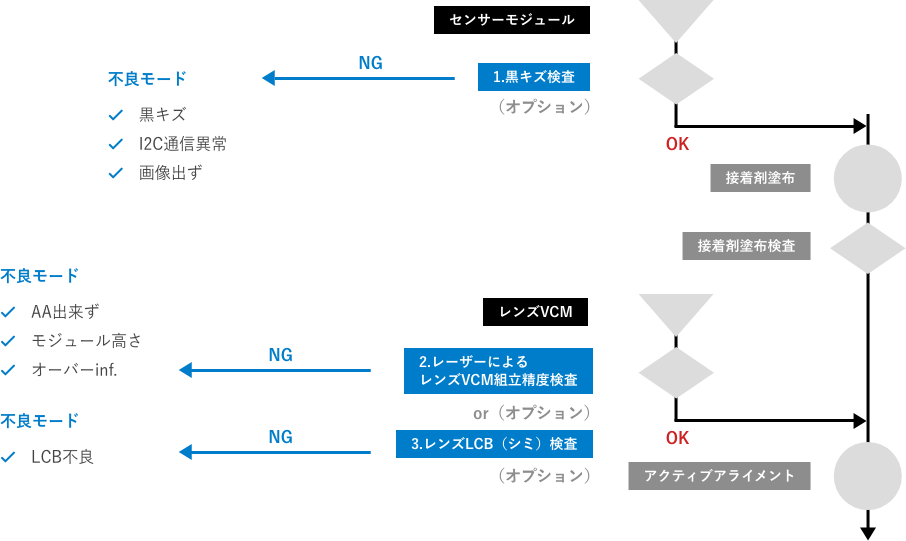
追加オプション機能
1.センサーモジュールの黒キズ検査を接着剤塗布前に実施する
薄いブルー箇所(※1)の不良;“AA出来ない”、“I2C通信不良”、”黒キズ不良”を事前にリジェクトできます。
AA装置の稼働率向上、レンズVCM材料の歩留まりロス低減が可能です。
AA装置の稼働率向上、レンズVCM材料の歩留まりロス低減が可能です。
2.レーザーによるレンズ+VCMの組立後寸法測定(レンズ高さ、組立チルト)をVCMを供給前に装置内で実施する
グレー箇所(※2)の不良;“AA出来ない”を事前にリジェクトできます。
AAの稼働率向上、センサーモジュールの歩留まりロス低減が可能です。
AAの稼働率向上、センサーモジュールの歩留まりロス低減が可能です。

正常
レンズ位置が非常に高い
→モジュール高さ不良
→モジュール高さ不良
レンズ位置が低すぎる
→over inf.不良
→over inf.不良
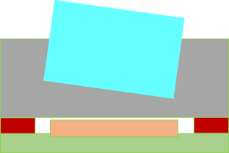
レンズチルト
→チルト補正出来ない
→チルト補正出来ない
追加オプションを加えたAAプロセス
装置仕様
アクティブアライメント装置の詳細な仕様は以下をご確認下さい。
標準仕様
| レンズホルダー/VCMサイズ | 25mm×25mm(最大)※大型センサーにも対応可能:1”〜4/3” | ||
|---|---|---|---|
| UPH | 量産装置:UPH1,500 ※開発中(プロト装置:UPH1000) | ||
| VCMトレイ・ハンドリング | 供給方法 | ソフトトレイ | |
| トレイサイズ | 〜250mm×150mm | ||
| 搬送方法 | 吸着搬送 | ||
| VCMハンドリング精度 | ±0.01mm | ||
| 供給マガジン数 | 2マガジン | ||
| 供給トレイ数 | 10トレイ/マガジン | ||
| マガジン数 | <265mm | ||
|
センサーモジュール ・ハンドリング |
供給方法 | キャリア or ハードトレイ | |
| キャリア/トレイサイズ | 〜230mm×110mm | ||
| 搬送方法 | 吸着搬送 | ||
| 搬送精度 | ±0.01mm | ||
| 供給マガジン数 | 4マガジン | ||
| 供給キャリア/トレイ数 | 10キャリア/マガジン | ||
| マガジン高さ | <145mm | ||
| ディスペンス | ディスペンス方式 | エアディスペンサ | |
| ディスペンサ数 | 2ディスペンサ | ||
| ディスペンスエリア | VCM:〜25×25mm | ||
| UV光源 | LED(365nm) | ||
| パワー | >2000mW | ||
| ディスペンス後検査 | カメラによる塗布位置、パターン、線幅検査 | ||
| AAシステム | AAステージ数 | 4ステージ | |
| Yawチルト角度 | ±3° | ||
| Row /Pitchチルト角度 | ±3° | ||
| 最大画角(FOV) | <150°(適正リレーレンズ&チャート距離時) | ||
| XYΘステージ 繰り返し位置決め精度 |
XY:<±0.5μm | ||
| Θ:<±0.001° | |||
| Z:<±0.5μm | |||
| XΘ YΘ:<±0.001° | |||
| チャートサイズ | 540mm×390mm | ||
| モジュール排出 | 排出方法 | ハードトレイ(JEDECトレイ) | |
| トレイサイズ | 〜322.6mm×135.9mm(Max.) | ||
| 搬送方法 | 吸着搬送 | ||
| 搬送精度 | ±0.01mm | ||
| 排出段積トレイ数 | 20トレイ | ||
| ユーティリティ | エアー | Dry Air | |
| 電源 | AC 1Φ 100V 60Hz 2kVA | ||
| AC 3Φ 200V 60Hz 20.8kVA | |||
| クリーン度 | Class100 ※パスライン上 | ||
| 装置サイズ |
(W)2650mm×(D)2500mm×(H)2000mm (シグナルタワー含まず) |
||
| 重量 | 約3000kg | ||
オプション
| 拡張性(オプション機能) | レンズホルダー/VCMサイズ | 35mm×35mm(最大) |
|---|---|---|
| センサーモジュールの黒キズ検査 | センサーモジュールを供給前に黒キズ検査導入 | |
|
レンズ+VCMの組立後の形状異常検査 (VCMに対するレンズ高さ、レンズチルト) |
VCM供給前にレーザーで3次元検査導入 | |
| レンズLCB検査 | レンズメーカでの組み立て時に混入された異物起因のLCB不良を供給前に検査 | |
| ディスペンス自動秤量システムの追加 | – | |
| ディスペンスノズル自動クリーニング機能の追加 | – |